Moonjun Gong
About Me
I received my bachelor’s degree in Artificial Intelligence from Beijing University of Posts and Telecommunications(BUPT). During May 2024 - Nov 2024, I worked as a research assistant in MARS LAB at Tsinghua University, working under the supervision of Prof. Hang Zhao. I was a research student in AI4CE LAB at New York University(NYU), working with Yiming Li, advised by Prof. Chen Feng from Mar.2023 to May 2024. Before this, I was a research student in COST LAB at BUPT from Mar.2022 to Mar.2023, advised by Prof. Jianqin Yin.
Research Interests
My primary research goal is to enable autonomous robots to perceive and interact with the physical world at a human level, ultimately creating positive societal impact across diverse communities.
My previous works on autonomous driving has provided me with a strong foundation in tackling complex perception tasks, developing novel algorithms, and managing large-scale datasets. Additionally, my research on Gaussian Splatting in large-scale and dynamic scenes has allowed me to address the unique challenges of modeling dynamic driving data.
Looking ahead, a key area I aim to explore is explainable, generalizable, and robust representation learning. I believe that generalizable and robust representations are essential for enabling machines to perceive and reason about the physical world from first principles, much like humans do. Moreover, explainability is crucial—not only for interpreting these models’ internal processes but also for ensuring their safety and trustworthiness in critical applications.
I am also intrigued by collaborative autonomous intelligence, as it allows autonomous robots to share and validate perception results and extend their perception range, which has the potential to significantly enhance the robustness and accuracy of the entire system.
In conclusion, my research interests are as follows:
- Robotics: Perception and Planning
- Computer Vision: Neural Radience Fields, Gaussian Splatting, 3D Scene Understanding, Collaborative Perception and Prediction
- Machine Learning: Explainable, Generalizable and Robust Representation Learning
News
- [Jun. 2025] GS-Occ3D: Scaling Vision-only Occupancy Reconstruction for Autonomous Driving with Gaussian Splatting, ICCV 2025.
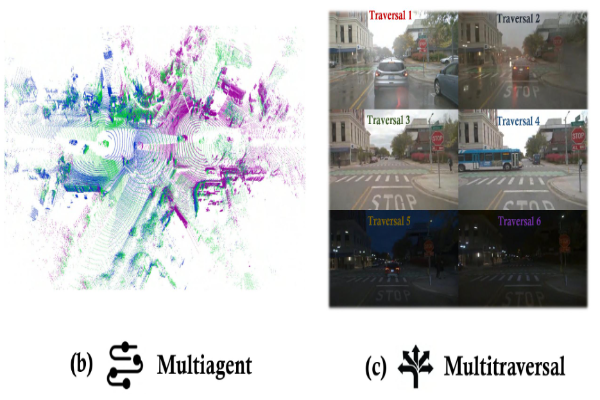
- [Jun. 2024] Multiagent Multitraversal Multimodal Self-Driving: Open MARS Dataset, CVPR 2024
- [Oct. 2023] Occ4cast: LiDAR-based 4D Occupancy Completion and Forecasting, IROS 2024
- [Jun. 2023] SSCBench: A Large-Scale 3D Semantic Scene Completion Benchmark for Autonomous Driving, IROS 2024
Publications
-
 CVPR
Computer Vision and Pattern Recognition, 2024.
CVPR
Computer Vision and Pattern Recognition, 2024. -
 IROS
International Conference on Intelligent Robots and System, 2024.
IROS
International Conference on Intelligent Robots and System, 2024. -
 IROS
International Conference on Intelligent Robots and System, 2024.
IROS
International Conference on Intelligent Robots and System, 2024.
Powered by Jekyll and Minimal Light theme.